1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
| clc;close all;clear all;
simTime=100;
T=1;
d = 3;
w2=3*2*pi/360;
w3=-3*2*pi/360;
H=[1,0,0,0;0,0,1,0];
G=[T^2/2,0;T,0;0,T^2/2;0,T];
r=100;
R=[r,0;0,r];
Q=G*[10,0;0,10]*G'; %模型过程噪声协方差矩阵
F(:,:,1)=[1,T,0,0;0,1,0,0;0,0,1,T;0,0,0,1]; %模型1状态转移矩阵
F(:,:,2)=[1,sin(w2*T)/w2,0,(cos(w2*T)-1)/w2;
0,cos(w2*T),0,sin(w2*T);
0,(1-cos(w2*T))/w2,1,sin(w2*T)/w2;
0,-sin(w2*T),0,cos(w2*T)]; %模型2状态转移矩阵 左转弯
F(:,:,3)=[1,sin(w3*T)/w3,0,(cos(w3*T)-1)/w3;
0,cos(w3*T),0,sin(w3*T);
0,(1-cos(w3*T))/w3,1,sin(w3*T)/w3;
0,-sin(w3*T),0,cos(w3*T)]; %模型3状态转移矩阵 右转弯
x = zeros(4,simTime);
z_k = zeros(2,simTime); %含噪声量测数据
measureNoise = zeros(2,simTime);
measureNoise = sqrt(R)*randn(2,simTime); %产生量测噪声
x(:,1)=[1000,200,1000,200]';
z_k(:,1)=H*x(:,1)+measureNoise(:,1);
for a=2:simTime
if (a>=20)&&(a<=40)
x(:,a)=F(:,:,2)*x(:,a-1);
elseif (a>=60)&&(a<=80)
x(:,a)=F(:,:,3)*x(:,a-1);
else
x(:,a)=F(:,:,1)*x(:,a-1);
end
z_k(:,a)=H*x(:,a)+measureNoise(:,a);
end
xkki(:,1) = x(:,1);
xkki(:,2) = x(:,1);
xkki(:,3) = x(:,1);
xkk = zeros(4,simTime);
pkk=zeros(4,4,simTime);
pkki(:,:,1)=zeros(4,4);
pkki(:,:,2)=zeros(4,4);
pkki(:,:,3)=zeros(4,4);
xkk(:,1)=x(:,1);
Sigmaji=[0.9,0.05,0.05;
0.1,0.8,0.1;
0.05,0.15,0.8];
ukk=zeros(3,simTime);
ukk(:,1)=[0.3 0.3 0.4]'; %IMM算法模型概率
for t=1:simTime-1
%第一步Interacting(只针对IMM算法)
ukk_1=Sigmaji'*ukk(:,t);
for i = 1:d
uji(:,i)=(1/ukk_1(i))*Sigmaji(:,i).*ukk(:,t);
end
for i = 1:d
x0(:,i) = xkki * uji(:,i);
end
for i = 1:d
temp = zeros(4,4);
for k = 1:d
temp = temp + pkki(:,:,k)+(xkki(:,i)-x0(:,i))*(xkki(:,i)-x0(:,i))'*uji(k,i);
end
P0(:,:,i) = temp;
end
% kalman滤波并且计算似然函数值
for i = 1:d
[xkki(:,i),pkki(:,:,i),xkk_1,pkk_1] = Kalman(z_k(:,t),x0(:,i),F(:,:,i),H,P0(:,:,i),Q,R);
lambda(i) = (1/sqrt(abs(2*pi*(det(H*pkk_1*H'+R)))))*exp((-1/2)*((z_k(:,t)-H*xkk_1)'*inv(H*pkk_1*H'+R)*(z_k(:,t)-H*xkk_1)));
end
lambda = lambda/sum(lambda);
for i = 1:d
ukk(i,t+1) = lambda(i) * ukk_1(i)./lambda*ukk_1;
end
ukk(:,t+1) = ukk(:,t+1)/sum(ukk(:,t+1));
xkk(:,t+1) = xkki * ukk(:,t+1);
end
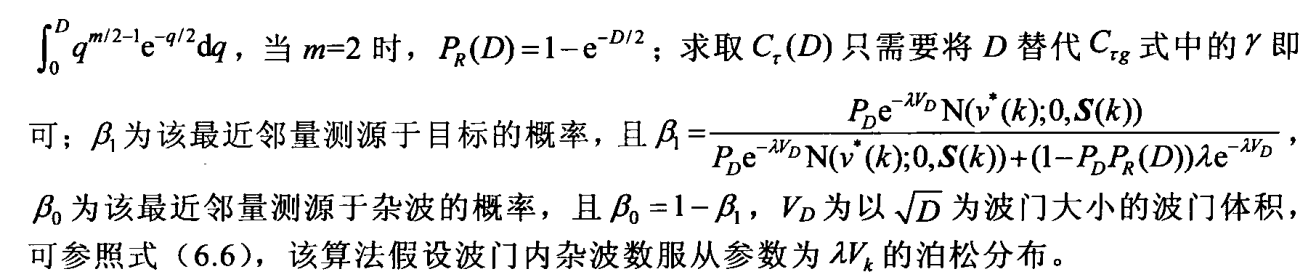
figure
hold on
grid on
plot(x(1,:),x(3,:));
plot(xkk(1,:),xkk(3,:));
plot(z_k(1,:),z_k(2,:));
xlabel('x axis(m)');
ylabel('y axis(m)');
legend('真实值','预测值','测量值');
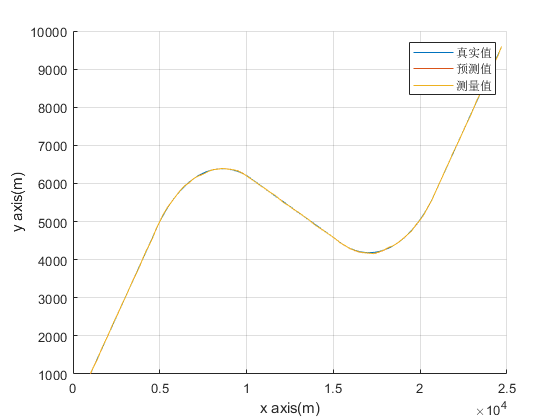
figure
hold on
grid on
plot(ukk(1,:),'k:','linewidth',2);
plot(ukk(2,:),'r-.','linewidth',2);
plot(ukk(3,:),'b--','linewidth',2);
title('IMM模型概率曲线');
xlabel('次数序号(s)'); ylabel('模型概率');
legend('模型1','模型2','模型3');
function [x_est,P_k_k,x_pre,P] = Kalman(z_k,x_est_k_minus1,F,H,P_k,Q,R)
x_pre = F*x_est_k_minus1;
P = F*P_k*F' + Q;
z_pre = H*x_pre;
S = H*P*H' + R;
K = P*H'/(S);
x_est = x_pre + K*(z_k - z_pre);
P_k_k = (eye(size(K*H,1))-K*H)*P;
end
|