目标跟踪中波门形状与参数
环形波门
环形波门一般用于航迹起始的初始化,是半径为$V_{min}\times T$和$V_{max}\times T$的圆包围的圆环
椭圆(球)波门
若传感器测得的目标直角坐标系下的转换量测值 $Z_{c}(k+1)$ 满足:
则称转换量测值 $\boldsymbol{Z}_{c}(k+1)$ 为候选回波,上式称为椭圆(球)波门规则。其中参数 由 $\chi^{2}$ 分布表获得。若量测值 $\boldsymbol{Z}_{c}(k+1)$ 为 $n_{z}$ 维,则 $\tilde{\boldsymbol{V}}_{k+1}(\gamma)$ 是将残差标准化后的具有 $n_{z}$ 个自由度的 $\chi^{2}$ 分布随机变量。
$\gamma$的值可以通过matlab函数chi2inv(1-alpha,nz)生成
对于不同 $\gamma$ 值和不同量测维数 $n_{z},$ 真实转换量测落入波门内的概率 $P_{\mathrm{G}}$ 就不同,定义
$P_{\mathrm{G}}$ 与量测维数 $n_{z}$ 和参数 $\gamma$ 的关系式可用下表表示。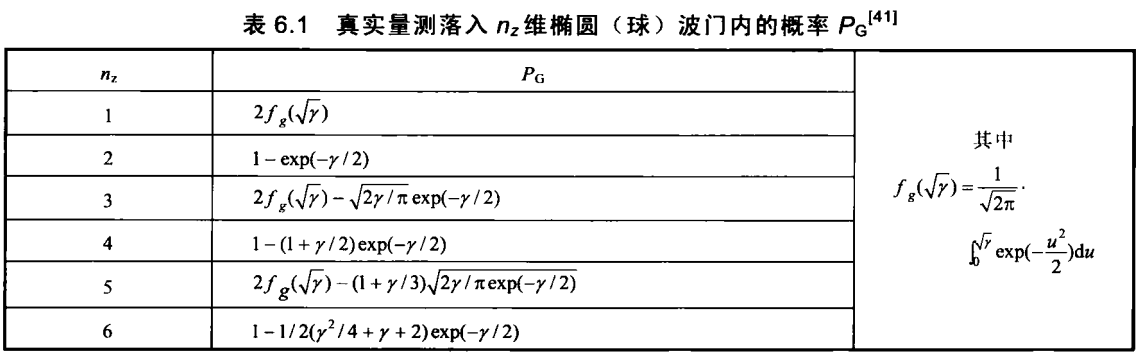
相应的$P_G$计算的matlab代码如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14function P_G = PG(gamma,N_z)
% 只实现了4维
switch (N_z)
case 1
P_G = 2*(normcdf(sqrt(gamma)) - normcdf(0));
case 2
P_G = 1-exp(-gamma/2);
case 3
P_G = 2*(normcdf(sqrt(gamma)) - normcdf(0)) - sqrt(2*gamma/pi)*exp(-gamma/2);
case 4
P_G = 1-(1+gamma/2)*exp(-gamma/2);
otherwise
end
end
$n_{z}$ 维析圆(球)波门的面(体)积为
式中
当 $n_{z}=1,2,3$ 时, $c_{n_{z}}$ 分别为 $2, \pi$ 和 $4 \pi / 3$。
利用新息协方差的标准差归一化可以得到
通过下式进行归一化:
相应的$V_{\text {椭}}\left(n_{z}\right)$计算的matlab代码如下:1
2
3
4
5
6
7
8
9
10
11function [Volume] = ellipse_Volume(gamma,N_z,S)
switch (N_z)
case 1
Volume = 2*sqrt(gamma)*sqrt(det(S));
case 2
Volume = pi*gamma*sqrt(det(S));
case 3
Volume = 4*pi/3*gamma^(3/2)*sqrt(det(S));
otherwise
end
end