交互多模型
滤波模型
假定目标动态特性包含在以下模型集中:
$r_{k}$ 是在状态空间内 $\{1,2, \cdots, d\}$ 满足一致性离散马尔可夫链的随机变量。
目标状态的后验概率密度 $p\left(\boldsymbol{x}_{k} \mid \boldsymbol{y}^{k}\right)$ 通过对联合概率密度各分量求和得
利用条件概率引理,上述方程右侧的联合概率密度可以分解为两项之积,即
令 $\mu_{k \mid k}(i)=p\left(r_{k}=i \mid \boldsymbol{y}^{k}\right),$ 后验概率密度可以表示为
将 $\boldsymbol{y}^{k}$ 展开为 $\left\{\boldsymbol{y}_{k}, \boldsymbol{y}^{k-1}\right\}$,利用贝叶斯理论可以得到上述方程右侧求和第一项的递推式:
式中: $p\left(\boldsymbol{x}_{k} \mid r_{k}=i, \boldsymbol{y}^{k-1}\right)$ 为预测概率密度 $; p\left(\boldsymbol{y}_{k} \mid \boldsymbol{x}_{k}, r_{k}=i, \boldsymbol{y}^{k-1}\right)$ 为似然函数 ; $p(\boldsymbol{y}_{k} \mid r_{k}=i, \boldsymbol{y}^{k-1}$ ) 为归一化因子。 式(3.45)的求和分量第二项 $\mu_{k \mid k}(i)=p\left(r_{k}=i \mid \boldsymbol{y}^{k}\right)$ 也可以通过递推计算。同 样将 $\boldsymbol{y}^{k}$ 展开为 $\left\{\boldsymbol{y}_{k}, \boldsymbol{y}^{k-1}\right\},$ 利用贝叶斯理论可得
令 $p\left(r_{k}=i \mid \mathbf{y}^{k-1}\right)=\boldsymbol{\mu}_{k \mid k-1}(i),$ 条件模型概率可表示为
式中: $\mu_{k \mid k-1}(i)$ 为模型预测概率 $; p\left(\boldsymbol{y}_{k} \mid r_{k}=i, \boldsymbol{y}^{k-1}\right)$ 为似然函数 $; p\left(\boldsymbol{y}_{k} \mid \boldsymbol{y}^{k-1}\right)$ 为归一
化因子。
某一模型的状态的预测概率密度和预测的模型概率
其中,均值和协方差分别为
预测模型概率 $\mu_{k \mid k-1}(i)$ 可以展开为
似然函数
令$\lambda_{k}(i)=p\left(\boldsymbol{y}_{k} \mid r_{k}=i, \boldsymbol{y}^{k-1}\right)$则 $\lambda_{k}(i)=N\left(\boldsymbol{y}_{k} ; \boldsymbol{H} \hat{\boldsymbol{x}}_{k-1 \mid k-1}^{i}, \boldsymbol{H} \boldsymbol{P}_{k \mid k-1}^{i} \boldsymbol{H}^{\mathrm{T}}+\boldsymbol{R}_{k}\right)$
归一化因数
条件概率密度和条件模型概率
条件概率密度展开为
条件概率密度可以近似为高斯分布, 即 $p\left(\boldsymbol{x}_{k} \mid r_{k}=i, \boldsymbol{y}^{k}\right)=N\left(\boldsymbol{x}_{k} ; \hat{\boldsymbol{x}}_{k \mid k}^{i}, \boldsymbol{P}_{k \mid k}^{i}\right),$ 其
均值和协方差为
条件模型概率 $p\left(r_{k}=i \mid \boldsymbol{y}^{k}\right)$ 为
经简化可得
IMM迭代计算方程
- for 对于每一个模型 i do
模型预测概率混合模型概率混合状态和协方差end for - for 对于每一个模型 i do
预测目标状态预测协方差状态更新协方差更新模型似然函数end for
模型概率:条件均值:条件协方差:
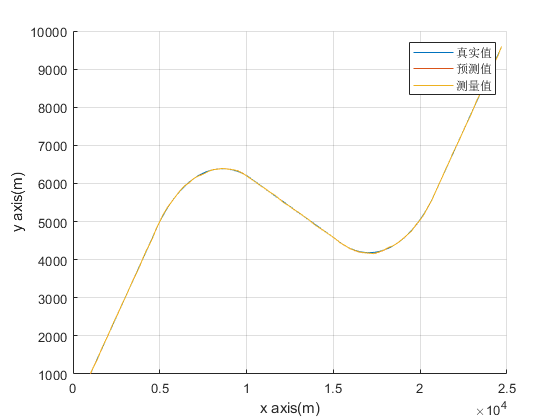
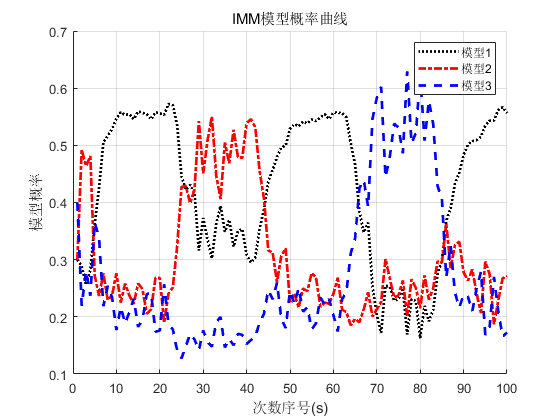
仿真
1 | clc;close all;clear all; |